By Dr Sheila Sutjipto
Last year, Professor Teresa Vidal-Calleja and I travelled to Japan primarily for a focused research collaboration at the Tokyo University of Science (TUS). While our joint work at TUS constituted the core of the trip, Teresa also took the opportunity to visit and deliver talks at several other leading research institutions across the country. This opportunity provided a comprehensive look at the broader Japanese robotics landscape, spanning space exploration, disaster recovery, social robotics, and human-robot interaction.
A Landscape of Service and Innovation in Robotics Research
A recurring theme across the institutions Teresa visited was the development of service and assistive robots designed to support human society. At Tohoku University, the Smart Robotics Design Lab is developing human-assist robots for caregiving and healthcare to support an aging population. Similarly, the Nara Institute of Science and Technology (NAIST) focuses on integrating machine learning and artificial to advance human-robot collaboration in real world applications.



The applications she encountered were highly diverse. Her visits included the Institute of Science – Tokyo’s Robotics and AI Laboratory, which focuses on robot audition and environment understanding, as well as Hokkaido University, where they address research in automated infrastructure inspection and autonomous driving for snowy environments.
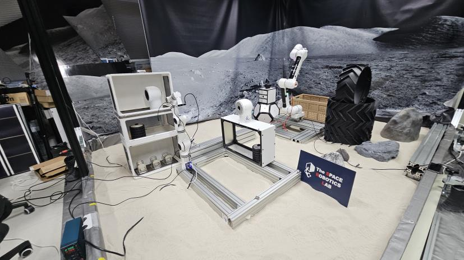
Additionally at Tohoku University, she observed autonomous systems and sensing units designed for extreme conditions at the Tough Robotics Lab and extraterrestrial exploration at the Space Robotics Lab. Teresa also attended The International Conference on Space Robotics (ISpaRo 2025) whilst in in Sendai. This event brought together aerospace experts, academia, and industry professionals to discuss innovations in space exploration.


These visits and talks provided valuable insights into the scope and societal focus of Japan’s robotics ecosystem, highlighting the diverse platforms currently being developed by researchers across Japan.
The TUS Collaboration: Merging Perception with Human-Centric RL
The primary research component of this trip was our collaboration with the Interactive Robotics Lab (Yoshida Lab) at TUS. TUS aims to make robots more intelligent by understanding human behaviour, utilising digital twins to simulate environments and humanoid robots to validate theories of natural motion.
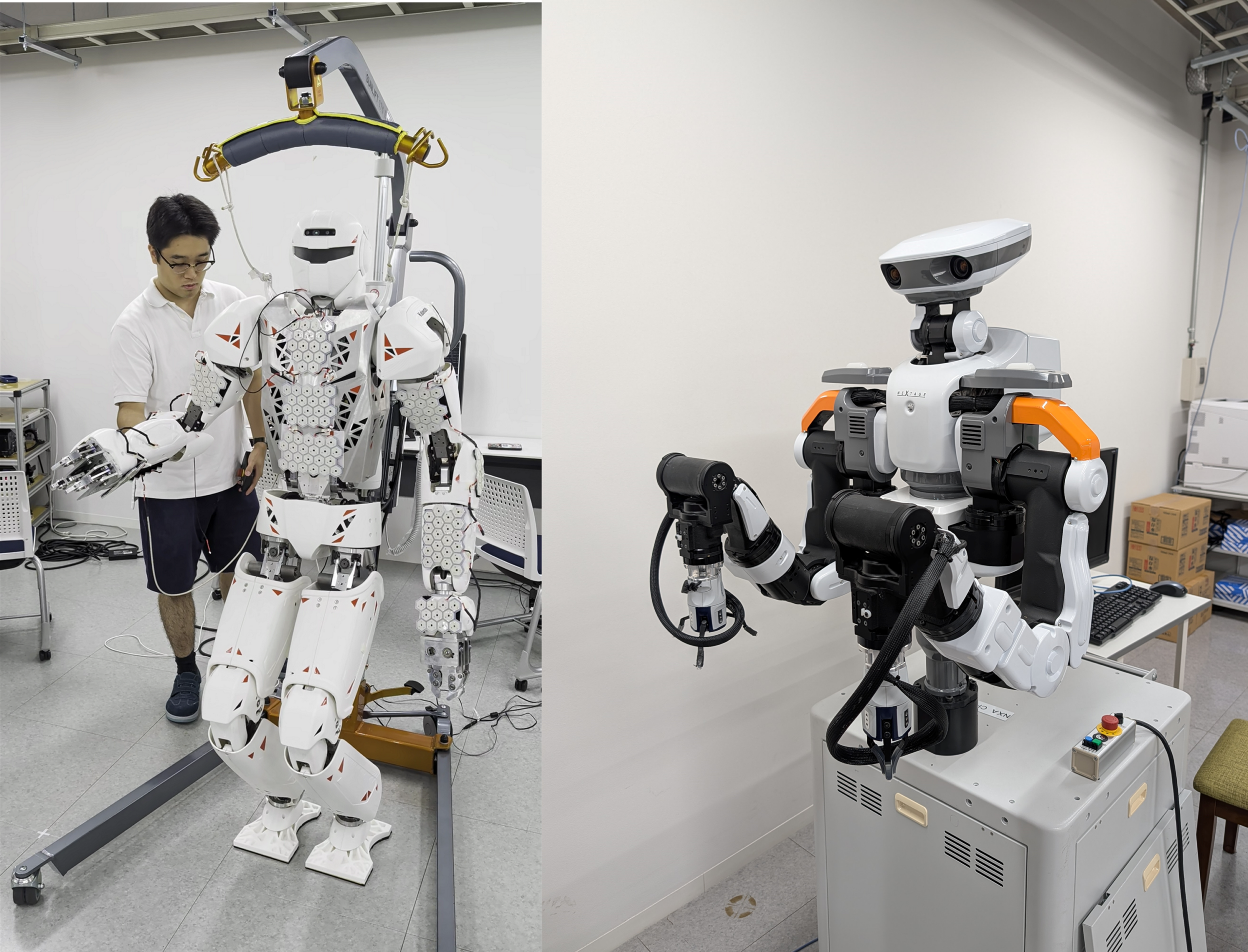
Our research streams are complementary where TUS has directed their research toward human-centric robotics, human-understanding and machine learning, and the team at the Australian Cobotics Centre focuses on cobots, perception, and how to intelligently construct and utilise representations of the environment. Our shared goal was to integrate our proposed research directly into TUS’s frameworks to create smarter, more efficient robot behaviours.
During our time in the lab, we focused on three interconnected challenges in cobot manipulation:
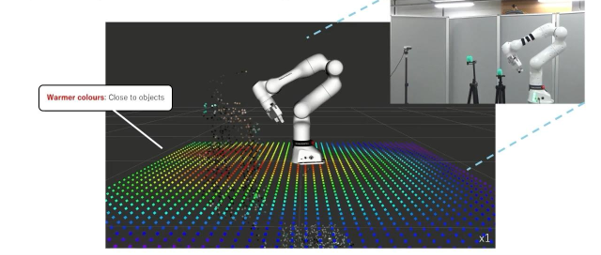
First, we looked at spatial awareness. We wanted to explore how continuous geometric information, specifically EDFs could be integrated directly into learning frameworks to give robots a better understanding of their environment and bridge the gap between simulation and reality.
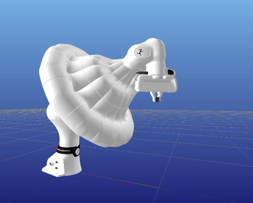
Second, we addressed the complexity of redundant manipulators. When a robot has an infinite number of ways to move its arm to reach a target, calculating the most efficient, collision-free path is computationally expensive. We wanted to explore a better way to map these possibilities and find a suitable trajectory.
Finally, we challenged the traditional approach to clutter. Standard perception systems treat obstacles as strict “no-go” zones. However, humans use the natural redundancy of their arms to gently push minor obstacles aside while reaching for a goal. We aimed to apply this physical intuition to cobots, allowing them to safely interact with their environment rather than simply avoiding it.
Outcomes
This collaboration established an ongoing research pipeline between our institutions, resulting in three joint publications that advance cobot planning and motion:
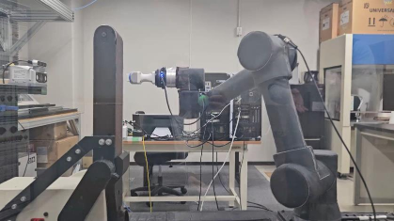
Bridging the Sim-to-Real Gap (International Conference on Intelligent Robots and Systems, IROS): We developed an RL framework that uses Euclidean Distance Fields (EDF) directly as the robot’s observation space. This gives the agent continuous geometric information about its environment, allowing for “zero-shot” transfer from simulation to a physical 7-DoF redundant manipulator. The real robot successfully generalised to unseen environments and avoided dynamic obstacles in real-time, despite being trained only on static objects.
Leveraging redundancy (Robotics: Science and Systems, RSS): We explored methods for leveraging manipulator redundancy to execute complex paths. Using efficient null-space sampling, we mapped the configuration space manifold for specific trajectories in the task space. This enabled us to create a distance field in configuration space, providing the robot with a highly efficient way to calculate collision-free trajectories.
Whole-Arm Safe Push and Place: In a forthcoming journal publication, we propose an alternative to strict obstacle avoidance. We designed a system that allows a cobot to hold an object in its end-effector while using its intermediate arm links to push obstacles out of the way. By using environmental information from the EDF with tactile feedback and enabling the robot to dynamically adjust its task speed during contacts, the robot can safely clear its own path, mimicking human behaviour.

Looking Ahead
These outcomes highlight the value of international collaboration. By combining TUS’s expertise in RL and human-centric robotics with our focus on perception and cobots, we addressed complex challenges that would be difficult to solve independently. The insights and frameworks developed during this trip continue to inform our ongoing research at the Australian Cobotics Centre.