At the 2022 annual Australian conference for the Computer-Human Interaction Special Interest Group, OzCHI, 20 researchers from leading Australian robotics research environments met up for the workshop “Empowering People in Human-Robot Collaboration”. This workshop was co-organised by members from the Australian Cobotics Centre and the Collaborative Intelligence Future Science Platform (CSIRO). In this short overview, we offer insights from the workshop that show challenges and opportunities for building this research in Australia.
An Australian Perspective on Human-Robot Collaboration
Discussions that considered “The Tyranny of Distance”, the classic account of how Australia’s geographical remoteness has been central to shaping the people’s values and available resources, identified the lack of robotics manufacturing facilities as one major challenge. While this limits the opportunity to conduct fundamental research that contributes to the hardware design of robots, this workshop discussed how this limitation enables Australian HRC researchers to focus more on application-specific and ‘in the wild’ research. Discussions around the cultural mindset that tends to lack trust in automation highlighted that this mindset can be used in answering critical research questions such as what work should and should not be automated. Workshop participants also called attention to one of the most fundamental problems that is not only relevant to Australian context or HRC research. Currently in research gatherings, we focus on sharing success stories. We need to start facilitating “failure tracks” to share the lessons learnt from failures if we want to truly expedite the advancement of HRC research.
Beyond the Australian perspective, the researchers offered several directions for future work in human-robot collaboration:
Human role in HRC: Participants discussed the terms we use for people in human-robot collaboration. Suggestions included collaborator, partner, and helper. Similarly, the role of the robot in relation to the person was discussed, e.g., robot as leader, follower, co-artist, etc. Examples of appropriate and creative ways of partnering included mimicking and training.
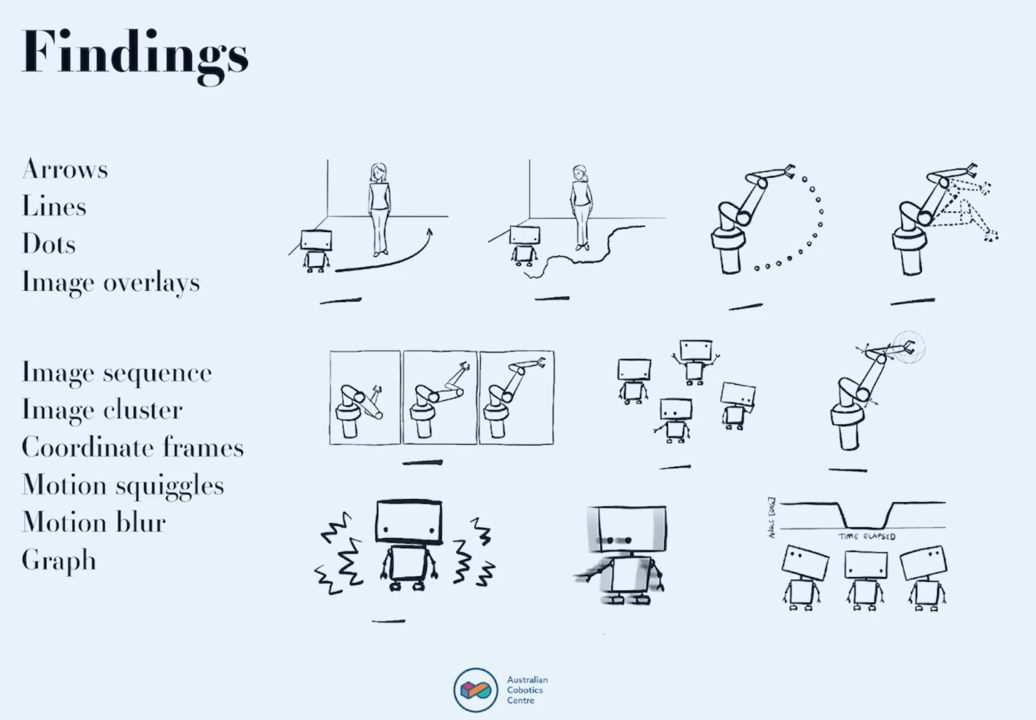
Improving awareness: An emerging research interest in enhancing robots’ and human collaborators’ awareness of each others’ states and actions was observed. Specifically, some participants were interested in studying how to model human internal states (e.g., cognitive workload) and individual differences using multimodal analytics, so robots can use related outcomes to adapt to human needs and augment humans. Another area of interest was to implement intelligent user interfaces to assist humans in predicting states and actions of robots and understanding reasons behind robots’ decisions.
Empathy for robots: While the focus of human-robot collaborative applications has mostly been on fulfilling human needs and achieving human goals, participants also highlighted that putting people in the ‘shoes’ of robots is also important. Topics discussed in this space included interface requirements of robots (considering robot-human as well as robot-robot interactions) and the need to prevent human abuse of robots.
Ethical considerations: Discussion covered the ethical considerations associated with the purpose, design and intended users of cobots, and the ways these may interact. Certain purposes, such as intimate engagements or persuasion, have ethical implications yet to be fully explored or resolved. Given the purpose of many collaborative robots is social, there are special considerations that need to be made when identifying and responding to the needs of vulnerable populations, such as children, elderly people, and people with disabilities. Design matters with broad relevance to ethical robotics include safety, appropriate trust, and transparency. Participants suggested special consideration should be given to the potential consequences of anthropomorphism of robots, including mistreatment of robots, attribution of moral agency, and uncanny valley backlash.
HRC design aims: There is a need for designers to consider how the design of the robot complements people. One example is the opportunity for robots to extend abilities of, or provide access for, people with disabilities. Related to this, participants noted the barriers of robots complementing people, including building and negotiating trust, making explainable robots, and designing collaboration in iterative steps.
HRC design approaches: Several discussions revolved around materials and prototyping approaches for design of collaborative robots. This was supported by questions around how to involve end users in prototyping processes and what kinds of wizard of oz methods could be appropriate. Another discussion around design approaches was centered on robot creativity and how to support human-robot interaction for creative purposes.
Evaluating HRC: A challenge for the research field is how to evaluate human-robot collaboration outcomes. Participants noted that this was mainly due to the dynamic nature of the collaboration. An example is trust which changes over the duration of the collaboration.
We thank all the participants for their valuable perspective, and CINTEL for a great workshop collaboration. Let’s continue to build this research community in Australia.