
Cobots manipulation with augmented mobility
Start: October 2022
Expected end date: August 2026
Complex manipulation tasks in unstructured, dynamic, large and often outdoor environments require robots that can be mobile. This project will work towards enabling human-robot interaction with mobile collaborative robots equipped with multiple on-board sensors. The project will address together the multi-sensory robotic perception, navigation and situational awareness problems of the mobile base, and will develop a framework to achieve collaborative tasks with the operators and the cobot actions while moving.
The project will exploit existing biomechanical models in conjunction with data-driven learning algorithms to optimise the interaction through robotic perception. This project has the potential to facilitate welding in unconstrained environments and complex loading or assembly tasks. A testbed for an industrial application will be developed to validate the research outcomes and multiple mobile manipulators will be available for this project.
Project Update – May 2023
- Conducted a thorough literature survey to find the challenges and gaps in literature.
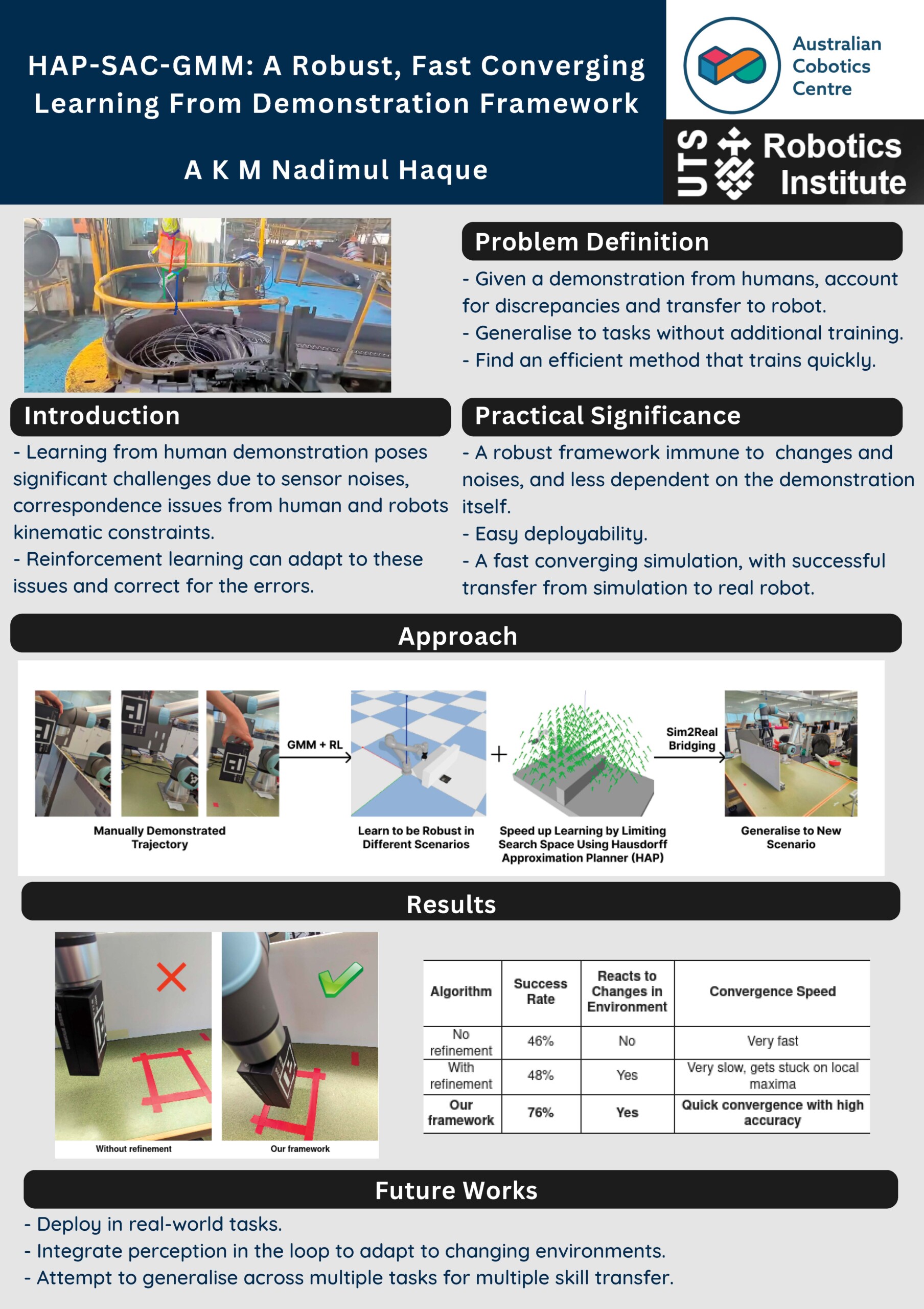
- Designed a simulated experiment for a learning from demonstration approach with probabilistic modelling and deep reinforcement learning.
- Conducting experiments with the learning framework to improve upon the demonstrated trajectories.
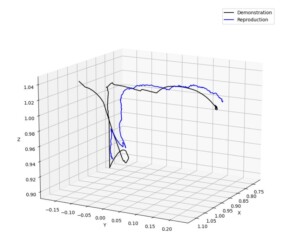
A Pybullet simulation of the demonstration:
Sampled trajectory after using a probabilistic model:
Research activities
This research project may involve the following activities:
- Context studies to establish candidate frameworks for collaborative human-cobot mobile manipulation
- Development of sensing, perception and navigation methods for mobile manipulators interacting with humans
- Deployment and evaluation of the collaborative human-cobot mobile manipulation framework in a welding or assembly task
Expected Outcomes
Upon completing this research, we expect to develop:
- New theory and methods for mobile manipulators interacting with humans
- Efficient sensing, perception, and navigation methods
- A framework for collaborative mobile manipulation
Supervisory Team
- Principal Supervisor: Professor Teresa Vidal Calleja
- Associate Supervisors: A/Prof Marc Carmichael, Dr Fouad Sukkar, Dr Sheila Sutjipto
Publications
- Haque, A. K. M. N., Sukkar, F., Sutjipto, S., Le Gentil, C., Carmichael, M. G., & Vidal-Calleja, T. (2026). Towards robot skill learning and adaptation with Gaussian processes. IEEE Robotics and Automation Letters, 11(5), 6408–6415. doi:10.1109/lra.2026.3681188
- Haque, A. K. M. N., Sukkar, F., Tanz, L., Carmichael, M. G., & Vidal-Calleja, T. (2024, October 14). Constrained bootstrapped learning for few-shot robot skill adaptation. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 5189–5194. Presented at the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates. doi:10.1109/iros58592.2024.10802705
Associated Researchers