POSTED: 01 Feb, 2024
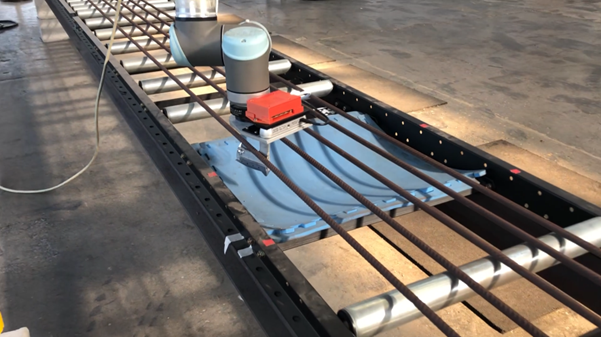
Our research team from UTS and QUT has wrapped up phase 2 of the “Shorts” project with Infrabuild which involved demonstrating steel bar removal using a lightweight collaborative robot. This was an important milestone in proving that a smaller and safer robot could carry out similar work to the current operators.

In addition, sensors placed along the bar production line in the Sydney Bar Mill have been capturing footage of short bars over several months. This comprehensive dataset of various bar types is being used to develop algorithms for automatic detection of defective short bars.


Members from Centre’s Biomimic Cobots program 1 visited Infrabuild’s Sydney Bar Mill in October last year to discuss findings from the study and to plan the next steps of the project.

The next phase of the project will see integration of the short bar detection and bar removal systems. Furthermore, key upgrades to the sensor system are underway in order to improve the detection of short bars and cover a wider range of scenarios that were learnt from the previous phase.
Another focus will be the human aspect. Understanding how a collaborative robot can integrate into existing workflows and how to best meet expectations. This will be an exciting opportunity to gain insights from workers and also for cross collaboration with other programs in the Centre.
Recent News
ARTICLE: Collaborative Robotics in Japan
By Dr Sheila Sutjipto Last year, Professor Teresa Vidal-Calleja and I travelled to Japan primarily for a focused research collaboration a ...
France24 Article – AI robot cleaners leave the lab for China’s living rooms
Great to see Dr Valeria Macalupú featured in this recent FRANCE 24 article on AI robot cleaners moving into everyday homes. As a postdoctoral rese ...
The Conversation article: Flying taxis and delivery drones could soon crowd city skies. What happens when they fail?
Centre Director Professor Jon Roberts recently co-authored an article in The Conversation with QUT Centre for Robotics Chief Investigator Professo ...