
Safe and Efficient Human-Robot Collaboration through Predictive Obstacle Avoidance in Dynamic Environments
Start: April 2023
Expected end date: October 2026
Project Outline
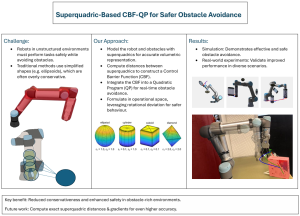
Most existing obstacle avoidance algorithms are designed for environments where objects remain stationary. As robots are increasingly introduced into spaces shared with humans, such as homes, workplaces, and public areas, these algorithms must evolve to handle moving obstacles and the uncertainty associated with human motion.
This project aims to develop a control system that allows robots to operate safely around people while continuing to perform their tasks efficiently. A central focus is on creating methods to represent obstacles, including humans, in a way that enables accurate and fast calculation of minimum distances and their gradients. These calculations are essential for guiding robot movement and ensuring safe interactions.
Building on this foundation, the project will explore how to model the unpredictable nature of human movement and task execution. A discrete-time stochastic controller will be designed to anticipate possible future states of nearby humans and respond accordingly. This approach offers a more reliable and adaptive solution compared to traditional controllers that only react to the current state of the environment.
The expected outcome is a system that supports more natural and flexible human-robot collaboration, allowing robots to operate freely in environments where people move without restrictions.
Expected or Achieved Outcomes
- Developed a method for efficiently representing obstacles in to enable fast and accurate minimum distance calculations between cobots and surrounding objects
- Introduced a framework that allows cobots to operate safely and effectively in unstructured environments, without compromising performance or requiring strict movement restrictions on humans.
- Published the results in IEEE CASE 2025, under the title “Superquadric Object Representation as a Control Barrier Function for Obstacle Avoidance”, highlighting advancements in safe and adaptive cobot deployment in real-world environments.
- An additional framework will be developed to enhance human-robot collaboration by predicting future human actions and incorporating uncertainty in both the task and its execution, with the goal of improving coordination and adaptability in shared activities.
Supervisory Team
- Principal Supervisor: A/Prof Marc Carmichael
- Associate Supervisors: A/Prof Alen Alempijevic
Publications
First Author
- TBC
Other Publications
- Multi-volume Potential Fields for Effective Learning from Demonstration, Moreno, V. H., Fernandez, L., Carmichael, M. G., & Deuse, J. (2024, August 28). Multi-volume potential fields for effective learning from demonstration. 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), 2342–2347. Presented at the 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), Bari, Italy. doi:10.1109/case59546.2024.10711395
The 2025 CASE Poster
Associated Researchers