POSTED: 24 Mar, 2026
Industrial automation has traditionally been built around a fundamental limitation: robots cannot “feel”. Sensing physical interaction with a workpiece or environment has historically required expensive hardware, making such capabilities impractical for many industrial systems. As a result, conventional industrial robots typically operate in isolation, executing preprogrammed motions without direct awareness of the forces they encounter.
The development of collaborative robots (cobots) introduced the ability to sense internal forces and detect collisions, allowing for safer human-robot interaction. However, true physical awareness requires external sensors. When equipped with exteroceptive sensors, such as those that measure forces or vibrations, robots can respond to external conditions like a changing workpiece. This capability expands robotic automation into applications that require both force sensitivity and precision, including complex finishing operations such as grinding and polishing.
Grinding remains one of the most physically demanding tasks in metal fabrication. The process requires a balance between force and precision; too little pressure slows production, while too much risks damaging the part or wearing down the tool prematurely. These characteristics make grinding a promising candidate for automation. Many manufacturers pursue robotic grinding not only to address rising labour costs and workforce shortages, but also to achieve process consistency and repeatability.
However, implementing robotic grinding typically requires high-end sensing hardware. These systems often rely on force/torque sensors to measure the interaction between the tool and the workpiece, enabling robots to maintain the controlled force necessary for precision finishing. These sensors can cost upwards of $4,400 USD. For many small and medium-sized enterprises (SMEs), particularly in Australia, this cost represents a significant barrier to entry, turning automation into a financial hurdle rather than a competitive advantage.
Recent research by PhD candidate, Zongyuan Zhang and his supervisory team suggests that robots may not need expensive sensors to achieve force awareness. Human operators performing grinding tasks often rely on subtle auditory cues, like the pitch and vibration of the tool, to judge the quality of contact with the material. Experienced machinists can detect changes in force or tool wear simply by listening to the sound of the process. Inspired by this intuition, researchers have begun exploring whether similar information can be extracted using low-cost acoustic sensing combined with machine learning.
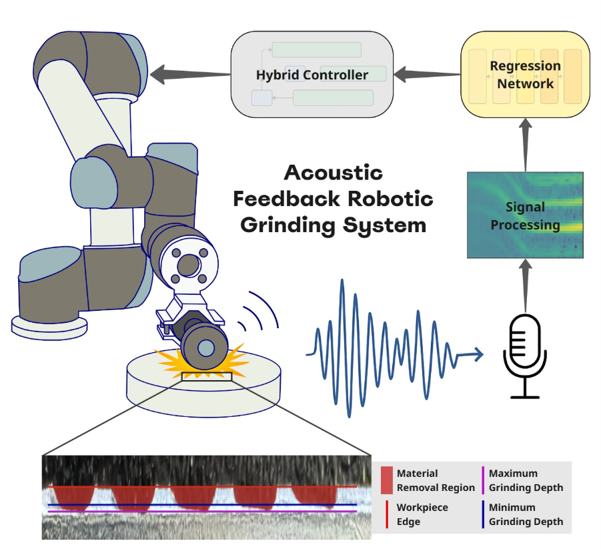
The proposed Acoustic Feedback Robotic Grinding (AFRG) system (see Figure 1) demonstrates how this approach can work in practice. Instead of measuring force directly, the system monitors the acoustic signature of the grinding process. A single contact microphone is mounted to the tool bracket, capturing vibrations transmitted through the structure of the tool while filtering out much of the ambient noise present on a factory floor.
The captured signal is processed by a specialised neural network known as PSDRegNet, a two-dimensional convolutional neural network designed to estimate the grinding force. By learning the complex relationship between acoustic patterns and grinding forces, the model can estimate the interaction force in real time. This data can then be used to adjust the robot’s behaviour online. Since the system learns this relationship directly from data, it avoids the need for rigid mathematical models that would typically govern robotic finishing processes. This flexibility allows the same system to adapt more easily to different materials, tools, and process conditions, reducing the time and engineering effort required to reconfigure robotic cells for new tasks.
Another challenge in robotic finishing is tool degradation. As grinding discs wear down or become clogged with material, their cutting efficiency declines. Robots that rely on fixed paths or constant force setpoints often struggle to compensate for this change, leading to inconsistent material removal over time. In experimental trials conducted on hardened stainless steel, a material known for accelerating tool wear, the AFRG system demonstrated a fourfold improvement in grinding consistency compared to traditional force-based control. Since the acoustic model captures tangential force information closely related to the material removal rate, the system can maintain a stable finishing process even as the physical properties of the grinding disc change.
The implications extend beyond grinding. If meaningful process information can be extracted from inexpensive sensors such as microphones, accelerometers, or cameras, machine learning may enable a new generation of low-cost perceptual capabilities for industrial robots. Instead of relying on specialised hardware for every sensing task, robots could infer key physical variables from readily available signals.
For the Australian Cobotics Centre, this approach demonstrates a cost-effective pathway for quickly upgrading existing industrial infrastructure, something important for many Australian SMEs. Many legacy robots are position-controlled, following a set of predefined positions without sensing the forces involved in the task. Retrofitting these systems with force sensors can be costly, but in contrast, an acoustic sensing system can be integrated with minimal modifications, offering closed-loop force control at a fraction of the cost.
More broadly, this work challenges the assumption that precision automation must rely on expensive hardware. By combining off-the-shelf sensors with machine learning, it becomes possible to convert robots from pre-programmed machines into adaptive systems capable of responding to their environment.
Acoustic Feedback for Closed-Loop Force Control in Robotic Grinding, Zongyuan Zhang*, Christopher Lehnert, Will Browne, Jonathan Roberts
Recent News
ARTICLE: Collaborative Robotics in Japan
By Dr Sheila Sutjipto Last year, Professor Teresa Vidal-Calleja and I travelled to Japan primarily for a focused research collaboration a ...
France24 Article – AI robot cleaners leave the lab for China’s living rooms
Great to see Dr Valeria Macalupú featured in this recent FRANCE 24 article on AI robot cleaners moving into everyday homes. As a postdoctoral rese ...
The Conversation article: Flying taxis and delivery drones could soon crowd city skies. What happens when they fail?
Centre Director Professor Jon Roberts recently co-authored an article in The Conversation with QUT Centre for Robotics Chief Investigator Professo ...